选择频道搜索
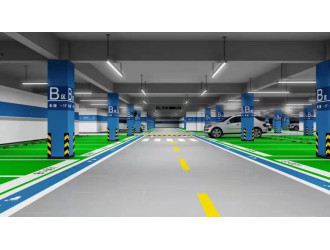
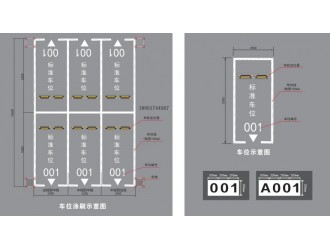
南京地下车库停车场设施
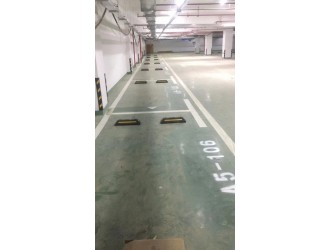
南京道路划线-侧方位停
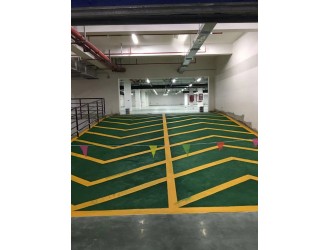
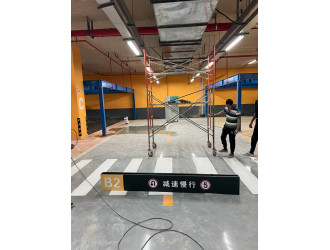
南京道路划线-地下车库
南京停车场地下车库停车
南京道路划线-南京达尊
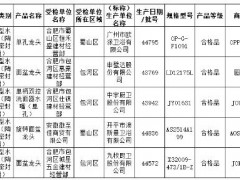
合肥市市场监督管理局:抽检5组节水型水龙头,全部合格
安徽德昆新材料:奠基仪式盛大举行
芜湖第八届家居文化节,将在芜湖奥体中心五环广场盛大举行
枞阳县家居建材行业协会成立大会在金麒麟大酒店二楼召开
博一建材
微信服务号:jc68-1
建材之家小程序码
云建会小程序码
建材商机小程序码
博一建材小程序码
客服微信




 ¥4.00
¥4.00
 ¥88.00
¥88.00
 ¥88.00
¥88.00
 ¥88.00
¥88.00
 ¥4.00
¥4.00
 ¥4.00
¥4.00




 粤公网安备 44030402000745号
粤公网安备 44030402000745号